
盾构机姿态精度控制技术
吕向红
(北京市政建设集团有限责任公司 第四工程处, 北京 100055)
摘 要:随着盾构隧道长度的增加,对施工控制测量的精度提出了更高的要求。结合北京市南水北调配套南干渠工程某标段施工经验,总结出影响盾构机姿态精度的主要因素,并提出了地面控制点(平面和高程)复核、竖井联系测量,洞内控制导线(水准点)的布设,自动测量系统站点、后视点,盾构机观测棱镜等关键环节的注意事项和误差分配原则,提高了盾构机姿态控制的精度。
关键词:盾构机;姿态精度;导线精度;测量误差分配;导线布设
中图分类号:U 452.14 文献标志码:B 文章编号:1009-7767(2012)04-0000-00
Technology Research of Attitude Control Accuracy of Shield Machine
Lü Xianghong
1 研究背景
北京市南水北调南干渠工程某标段工程,输水隧洞全长3067m,采用盾构法施工,附属7个工作井明挖施工。隧洞设计线形多变,含有5个平面曲线、3个竖曲线段,最小曲线半径R=450m,最大纵坡i=0.019;此外,除了盾构始发和接收外,掘进过程中需要穿越中间5座工作井的预留洞口,这对盾构姿态控制的精度要求非常严格。针对工程特点、难点,应在盾构掘进施工前,制定一套严谨、科学、实用的施工测量方案,严格控制每个环节的测量误差,提高盾构进出洞口的精度,减小盾构机推进过程中蛇形偏移量。
在影响盾构姿态精度的各个因素中,提高洞内导线精度是最重要的。在导线布设过程中,通过规范观测、陀螺经纬仪定向以及两井定向的方法进行校核,从而提高控制盾构机姿态精度,减小成型隧洞偏差值。
该工程盾构机出洞的水平偏差为18mm,高程偏差为8mm,隧洞质量完全满足规范和设计要求。
2 控制测量
2.1 平面控制网
工程建设的首级控制网一般是由建设单位委托设计院(测绘院)进行布设,多为C级或D级GPS控制网或精密控制导线,作为施工测量的起算数据。GPS点应埋设永久性的标石,并绘制点之记。GPS控制点应有1~2个方向通视,便于常规测量方法加密控制网。观测前应对GPS接收机和天线等设备进行全面检验,满足各项检测条件后方可进行观测。
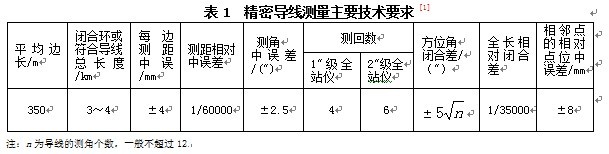
按照建设单位交桩资料进行测量复核、加密控制点。一般应在盾构始发井口和盾构接收井口附近设置控制点,纳入平面控制网进行平差处理。加密导线测量根据现场实际情况选点、沿工程线路设置,与GPS控制点形成局部附合导线,技术指标满足GB 50308-2008《城市轨道交通工程测量规范》中精密导线测量技术要求。精密导线测量技术要求详见表1。
2.2 高程控制网
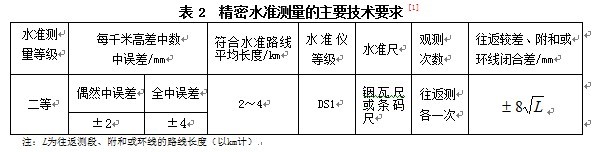
地面高程控制点与平面控制相同,通常由建设单位委托设计院(测绘院)进行交桩,施工单位按照城市二等水准测量的技术要求进行加密(见表2),加密布设的高程控制网一般与平面控制点相同,沿工程线路布设成附合路线、闭合路线或结点网形,便于施工期间进行校核。根据盾构施工的特点,应在盾构始发井、接收井附近设置2个以上水准点,方便校核以及进行竖井联系测量。水准点应选在地基稳定、不受施工影响、容易保护、便于观测的地方,并做好现场标识。
2.3 洞内控制测量
控制盾构机姿态精度的主环节就是提高洞内控制导线的精度、减小测量误差的积累,其最重要的环节就是改善洞内观测条件、加强井上、井下的联系测量工作,在满足规范要求的基础上,提高洞内控制导线的精度。
该盾构隧洞全长3067.0m,而且线形多变,穿越重要设施、竖井预留洞口多,仅靠始发井将地面控制点导入隧道内,即使规范作业、精度符合要求,盾构机姿态精度也不会很理想。因此,在隧道掘进500~600m时进行了陀螺定向,利用中间施工竖井进行两井定向;在贯通前200~300m时,再次进行陀螺定向,及时对控制点的坐标、最前方导线边方位角进行综合平差处理,提高盾构机姿态精度,取得盾构机高精度贯通进洞的良好效果。
3 盾构姿态控制测量精度分析
3.1 测量误差的来源
根据相关工程测量规范要求,结合盾构施工的测量控制特点,总结以前施工经验,应从以下几个方面,做好盾构施工控制测量工作,减小测量误差的积累,提高掘进过程中盾构机姿态控制的精度。
1)地面控制测量;
2)竖井联系测量;
3)自动测量系统测站、后视点测量;
4)地下控制测量;
5)盾构姿态测量。
3.2 贯通误差限值控制及误差分配
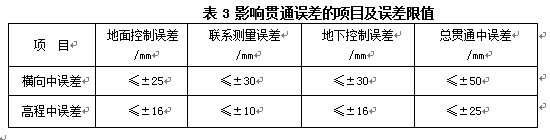
根据测量误差的特性、工程项目设计文件的技术要求,以及多年盾构施工测量经验,影响盾构贯通的主要是横向中误差和高程误差,控制指标见表3 。
1)平面控制测量的误差分配
横向贯通误差主要来源于地面控制导线测量误差、竖井联系测量误差,地下延伸导线测量及盾构机姿态的定位测量误差等影响因素。其他因素影响较小,可以忽略不计。假设各项测量误差相互独立,则根据误差传播定律得出:
mq2=mq12+mq22+mq32+mq42 +mq52
式中:mQ为隧道贯通平面横向中误差;mq1为地面控制测量中误差;mq2为盾构施工竖井联系测量中误差;mq3为洞内导线测量中误差;mq4为测站、后视吊篮测量中误差;mq5为盾构机、观测棱角的定位测量中误差。
由于地面和洞内观测条件不同,以及所用测量方法等因素,各种误差来源对横向贯通精度的影响程度不同,应采用不等精度观测分配原则进行复核,取值如下:
mq1=n ,mq2=3n ,mq3=4n ,mq4=3n ,mq5=2n 。
代入式中得:
mq=( mq12+mq22+mq32+mq42 +mq52)1/2=6.3n
该工程允许横向贯通误差为±50mm,则其中误差mq=±25mm。
n=±25/6.3=±4.0mm
从而可以得出每个控制环节的测量中误差值:mq1=±4.0mm, mq2=±12mm ,mq3=±16mm,mq4=±12mm ,mq5=±8.0mm。
地面控制测量中误差mq1是施工测量的起算数据,已经进行过平差处理,而测站(后视)吊篮测量误差mq4以及盾构机、观测棱角的定位测量中误差mq5均是偶然误差,只要精心观测就可有效减小。因此,竖井联系测量中误差mq2,洞内导线测量中误差mq3,是测量控制的重点,也是提高盾构机姿态控制精度的重要环节。
2)高程测量误差分配
高程测量误差主要来源与平面控制测量相同,有以下5个方面,根据误差传播定律计算公式为:
mh2=mh12+mh22+mh32+mh42+mh52
式中:mh为隧道高程贯通测量中误差;mh1为地面高程控制测量中误差;mh2为竖井传递高程的测量中误差;mh3为由盾构进洞处到隧道贯通处地下水准测量中误差;mh4为洞内测站高程测量中误差;mh5为盾构机姿态高程测量中误差。
根据盾构施工测量的经验,高程测量误差采用不等精度分配,取值如下:
mh1=±14mm ,mh2=±10mm ,mh3=±10mm ,mh4=±5mm ,mh5=±14mm
代入式中得mh=±24.8mm〈±25mm
按上述分配精度指标,进行平面和高程控制测量,只要控制好每一环节的误差值,就能满足盾构隧洞贯通测量精度要求。
3.3 联系测量精度分析
竖井联系测量是隧道施工测量中的一个重要环节,它主要是将地表的平面及高程,通过井筒传至地下导线点及水准点,使洞内、外形成统一的坐标系,以便确定洞内控制导线的起始方位角和坐标值。通常采用以下方法进行施测:
1) 观测条件允许的情况下,可以采用全站仪直传法将控制点引测到盾构隧洞内,但应注意洞口内、
外气流以及全站仪竖角过大对观测精度的影响,最短边长不宜小于80m。
2) 常规联系三角形法。其误差包括测量边长所引起的计算角度的误差、角度观测误差以及投点(吊
钢丝)产生的误差。在进行竖井定向时,都要移动吊锤线,观测不同的3组联系三角形,取3次观测平均值作为一次定向值。在实际施测过程中,一般取5″作为洞内导线起始边的中误差。
3) 根据施工现场条件,也可选用精度达标的激光铅锤仪直接投点,作为洞内导线起算数据。
随着盾构隧洞不断延长,洞内导线的误差也会累积增大,应经常采用两种或两种以上的方法进行互校,提高洞内控制精度,也可增加陀螺经纬仪定向边,提高洞内控制网的强度。
3.4 洞内单导线终点位置误差估算
由于洞内观测条件所限,一般盾构隧道控制测量都采用单导线、或双导线检测的布设形式,为了减小观测误差,我们把导线布设成等边直伸形导线。我们都知道横向误差是制约盾构隧道贯通的主要因素,主要由测角误差和起始方位角误差引起;纵向贯通误差很小,可以忽略不计。为了提高控制导线边的方位角精度,支导线过长时应在其终端加测起始方位角。按等边直伸形导线估算,支导线与方位附合导线终点位置误差的估算可用下面公式计算:
1)支导线终点位置误差:
 (1)
(1)
2)方位附合支导线终点位置误差:
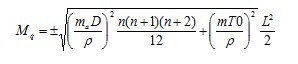 (2)
(2)
式中: 为测角中误差; 为起始边方位角中误差;L为支导线长度;n为支导线边数;D 为平均边长。
3.5 南干渠某标段盾构掘进测量偏差分析
盾构掘进到约2260m位置,需要穿越工作竖井,根据现场盾构出洞的实际偏差情况,对洞内控制导线精度进行分析。因隧道线路有多处曲线段,导线布设为双导线形式,平均边长D=150m,测角中误差为2.5″,起始方位角中误差取5.0″,根据公式(1)、(2)可以计算导线任意一点的横向点位误差,随着导线长度不断增大而增大,见图1。
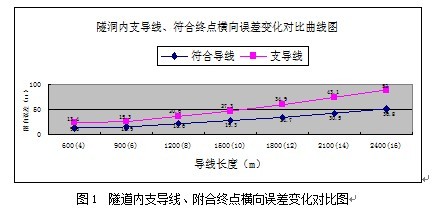
根据平面控制测量的误差分配方案,洞内控制导线的中误差为±16mm,则限差为±32mm,对照图1可以看出,当隧道长度小于1500m时,两种导线敷设形式均可满足限差要求;等于1800m时,支导线已不能满足要求;等于2100m时,符合导线已接近限差要求;当隧道超过2400m时,导线终点偏差值已经超过限差值。
根据分析结果,在盾构穿越该工作井后,采用两井定向的方法对洞内控制导线进行校核,大大提高了隧洞内控制导线的精度,为盾构机最后精准进洞贯通提供了准确无误、精确的控制数据。
4 结论
结合南水北调某标段盾构隧洞工程实践,通过测量误差来源的分析计算,得出以下几点结论:
1)地面控制测量数据经过严密平差计算,观测棱镜与盾构机位置关系误差是偶然误差,这些误差对控制盾构机姿态精度影响很小,主要是竖井联系测量和洞内控制导线测量误差的影响。
2)从图1可以看出,在一定的观测精度条件下,误差值与导线总长L、导线边长D有关;导线最远点横向误差主要取决于导线总长L,两者之间接近于正比例关系。
3)采用多种测量方法进行测量结果的校核,可以有效提高控制网的精度。
参考文献:
[1] 北京城建勘测设计研究院有限责任公司.GB 50308-2008城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008.
收稿日期:2012-03-02
作者简介:吕向红,男,测绘工程师,学士,主要从事市政工程施工测量工作。
注:本文刊载于《市政技术》2012年第4期,第108页至第111页。