
全国市政工程行业科技成果展示:道路移动式3D数据智能化采集处理系统研制与应用
“道路移动式3D数据智能化采集处理系统研制与应用”项目于2014年6月立项,2016年6月完成系统集成,并通过了北京公路学会组织的项目成果鉴定。该项目研究由北京市政路桥管理养护集团有限公司(简称:北京养护集团)、北京路桥瑞通养护中心等承担。该研究项目成果获2016年度“北京市政路桥集团有限公司科学技术奖”一等奖,其成果适用于公路及城市道路养护信息化管理系统中基础数据的采集。
项目研究技术原理
道路移动式3D数据智能化采集处理系统(简称数据采集车)是基于三维实景平台的道路养护数字化管理系统建设的主要组成部分,其研究的技术原理及技术路线如下。
数据采集车的组成 数据采集车由全景相机、激光扫描仪、高精度GPS、数字里程计、车载计算机以及配套的载车、电源等各部分组合集成。

数据采集车外观
数据采集工作原理 数据采集车运用计算机、图像处理、GIS技术、定位等多元信息系统集成技术,把收集到的全景影像数据、激光扫描数据、定位数据、授时数据等信息进行存贮、处理、分析、计算,输出所测区域的空间和属性数据。其基本工作原理如下:①在载车行驶中,计算机连续接收GPS信号(称之为GPS时间)作为各传感器的同步时间;②激光扫描仪对载车前方180 °范围内区域扫描,得到载车行驶路线上的所有点云数据;③轮速计输出载车的速度数据,计算机根据GPS时计算出的行驶距离控制全景相机进行拍照;④全景相机输出全景影像数据,计算机接收并连同轮速计距离、GPS时记录到硬盘,得到全景影像数据;⑤高精度GPS记录地理位置坐标,得到载车行驶线路上一系列具有同步时间基准的激光点云、车速、全景影像、GPS点等采集数据。
数据采集车工作原理
关键技术路线 该项目的关键技术路线主要包括以下几个方面:①车载3D数据采集车集成技术;②数据采集系统定位和定姿技术;③车载传感器的控制及管理技术;④车载3D数据采集车各传感器时间同步控制技术;⑤面向数据采集成果检查及辅助软件开发技术;⑥面向道路养护的3D街景数据发布系统开发技术;⑦采集车获取路面损坏数据在交通运行影响研究技术。
项目关键技术及创新点
该项目研究的关键技术及创新点如下。
1)该系统没有使用昂贵的IMU(惯性测量装置)作为定姿传感器,而是采用数据后处理的方法,将多个不同测站得到的激光点云数据作对比,得到特征点的不同位置,根据后方交会原理计算出采集车的实时位置及姿态,然后再通过计算高密度的“点云图”获取待测目标的地理位置和几何形状信息,通过全景相机拍摄路侧目标信息,获取其属性信息。
2)采集车得到的一系列数据传输到一台(或多台)电脑中,通过数据后处理软件处理可高效率地得到高精度、低成本的影像、位置数据及三维属性数据,满足交通及道路养护行业应用需求,将多维数据采集的成本从每千米1万元左右,降低到每千米3 000~5 000元,实现了大规模数据的低成本生产。
3)该项目成果中的道路三维实景体系设计在国内处于领先地位,拥有自主知识产权,可满足道路养护管理业务的需求,服务于城市道路养护与管理,具有较高的应用推广价值,经济及社会效益良好。
国内外同类技术发展趋势
道路移动式3D数据智能化采集处理系统,同类技术系统在国外称为移动道路测量系统(Mobile Mapping System,MMS)。目前国内外已经面市的MMS,技术原理基本相同,大都采用了获取精确姿态数据的精密关键部件,系统的整体造价昂贵。随着计算机性能的提高,全景影像数字相机、三维激光扫描设备的推广应用,以及图形图像识别处理技术、高精度卫星定位技术、地理信息技术的发展,通过对一系列多个相邻图像识别而获取姿态的技术也得到了研发和应用。近年来,采用全景影像景和激光数据来快速获取三维数据及其影像数据的技术逐渐发展成熟起来,并在地图数据生产单位开始应用。与传统技术相比,这种新技术不再需要IMU部件,取而代之的是大量的全景影像数据、激光扫描数据和算法软件,从而使移动道路测量系统设备具有了结构简单、便于维护、易于操作和成本低的特点,是当前MMS技术发展的主要方向。
项目成果应用与效益
通过该项目研究,北京养护集团在引进相关核心技术的基础上,自主研发了一种高效率、低成本、易操作的360 °全景数据及激光点云等数据采集系统。该系统顺应了MMS技术的发展趋势,它可以快速获取、更新道路三维数据或二维地图,并利用这些数据构建精准的路网及其设施三维数据,建设道路三维实景平台,进而实现路产精细化管理、路政协同管理、档案数字化管理、日常病害可视化管理、道路规划及设计方案展示、工程施工管理等诸多基于三维实景的道路养护信息化管理功能。
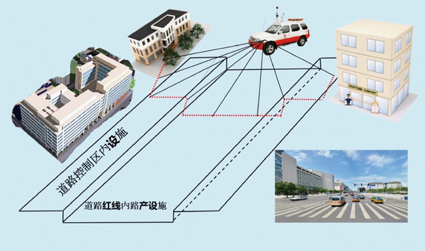
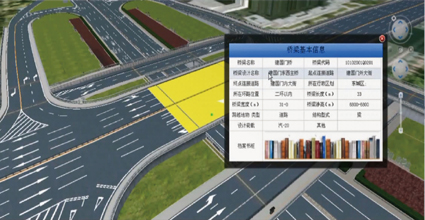
基于三维实景的道路资产管理 基于多维地理信息技术、数据库技术、数字测绘技术,融合二维三维矢量数据、影像数据和基础设施属性信息,实现道路路产信息从报表到二维、从二维到三维、从三维到实景的精细化管理。涵盖了具有三维特征的道路及其设施属性库,为道路交通规划、养护、资产经营等业务管理和公众服务提供全面的基础数据支撑,促进道路资产综合管理水平的提升。
路产多维数据组成
基于三维实景的路政管理 基于实景影像与三维模型动态同步播放比对功能,结合三维符号库,实现路政巡查结果的快速动态更新,通过对更新的事件信息的查询、分析,实现日常道路治理对象与道路最终保护目标的最佳结合,及时有效的发现、制止、查处各种侵害道路路产路权的违法行为,保障道路完好、安全、畅通,促进道路综合效益的发挥。

实景影像与三维模型实时同步
基于三维实景的档案管理 在原有纸质档案管理的基础上构建数字化的档案管理系统,在道路新改建过程中实现三维数字化,以三维数字化模型为核心,提供直观的图标与报表显示,提供强大的数据检索功能,不仅可以集成从设计院移交过来的施工图,竣工图等设计资料,还可以与道路资产管理系统进行对接,使企业信息资源得到有效整合,实现数字化移交,提高路桥工程信息管理水平档次。
基于三维数据的档案管理
基于三维实景的道路日常巡检及定检报告管理 通过将日常巡检病害与三维数据和实景照片相结合,实现了病害的结构化、规范化、精细化管理,辅助生成检测报告。依据日常养护对应的病害类型和历史检测信息进行分析筛选,实现病害自动评分,给出等级评定和结论,导出日常养护管理清单,为道路中长期养护需求和年度养护提出建议。

基于三维实景的道路日常巡检及定检报告管理
基于三维实景的设计方案展示 利用三维模型找到碰撞和错误,达到方案优选及改进的目的;通过模型展示方案整体设计效果,实现整体线路从地上到地下、从宏观到微观的比较,为领导提供决策支持,三维实景化施工方案的动态推演形象直观、易于理解,大大缩短了信息传递路径,提高了沟通汇报效率。
基于三维实景的施工管理 通过三维建模技术的应用,目前已经实现从地上建筑物到地下管廊等全线三维模型的总体展示和施工关键信息的查询,正在开展的将三维模型在路桥工程中的项目管理、进度管理、实施监督等阶段的研究和应用也已初有成效,今后将继续努力突破三维技术在路桥工程管理中更具核心层次的应用,实现项目全生命周期管理。
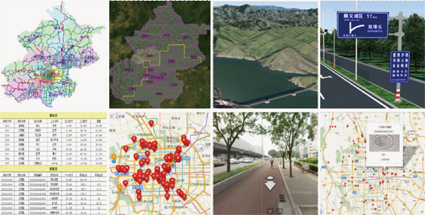
北京及其他城市的应用成果 目前,通过该项目技术成果与其他相关技术的集成应用,北京养护集团在道路高精度数据获取及三维数据制作方面已具有了全面、雄厚的技术积累及应用经验,建设了省级的多维信息管理平台,可以快速、高效、高精度地采集路网及其设施的影像数据、激光数据和位置信息数据,成果数据相对精度在0.1 m之内,绝对精度在0.5 m之内,数据正摄投影数据宽度可以达到20 m。街景全景影像系统可以360 °无死角拍摄道路周围及地表的无遮挡地物。
北京养护集团基于该项目研究成果,将街景技术与道路养护管理相结合,进一步研发了适用于专业道路养护管理的基于手机平台的“养路通”APP软件,通过该软件的应用,可以实现道路养护从病害发现、审批下发、维修上报、监督复核、资金拨付的全流程管理。目前该系统支持了北京养护集团近10亿元年产值的道路综合养护维修业务的开展,系统整体运行状况良好,满足了北京地区道路日常养护管理业务的需求,并在厦门、广州、赤峰、成都等地先后实现了技术输出和推广应用,实施效果非常好。
同时,该项目的技术成果已被北京市交通委员会TOCC中心、路政局、北京公联信达智能交通技术有限公司和北京交通信息中心等单位采用,应用于进行相关道路基础数据的系统采集工作。与道路基础数据采集的传统作业方式相比,“道路移动3D数据智能化采集处理系统”技术的应用,大幅度提高了道路基础数据采集的工作效率及数据质量,也大大降低了整体数据采集作业成本。
项目成果应用效益 该项目成果应用的经济及社会效益主要体现在以下几方面。
1)优化了道路数据采集作业流程,提高工作效率,数据生产成本与传统生产方式相比,约降低70 %。
2)该采集车采集的数据,可以自动识别判断道路设施的变化情况,增强路政执法的客观性,为参与路政应用系统建设奠定了基础,目前已经参与到路网中心主导的路政设施审批模块的开发建设中。
3)应用采集车技术,开发了基于公路的不停车路面病害检测系统,减少巡查车停车次数,缩短巡查对交通的影响、降低了巡查人员因上路造成的人身安全。
4)采集车获取的实景影像可以形成丰富的过程资产数据库,数据形成体系后,可以反映道路的历史发展及变化情况。
(北京市政路桥管理养护集团有限公司 供稿)
注:本文刊载于《市政技术》2018年第2期,第1、2、3页。